El diseño de un sistema de control involucra tres pasos:
-Especificaciones de Diseño.
-Configuración del compensador o controlador.
-Parámetros del controlador.
El diseño de sistemas de control en el dominio del tiempo que emplea especificaciones de diseño tales como tiempo de levantamiento, tiempo de retardo, tiempo de asentamiento o sobrepaso máximo, resulta analíticamente factible sólo para sistemas de segundo orden o para aquellos que se puedan aproximar mediante sistemas de segundo orden.
Los procedimientos de diseño que emplean especificaciones en el dominio del tiempo son difíciles de establecer para sistemas de orden superior a los de segundo orden.
Especificaciones de Diseño
Las especificaciones de diseño se emplean a menudo para describir qué debe hacer el sistema y cómo debe hacerlo. Dichas especificaciones son únicas para cada aplicación individual y, para el diseño en el dominio del tiempo de sistemas de control lineales tenemos entre otras: la precisión en estado estable, el sobrepaso máximo, los tiempos de levantamiento y de asentamiento, todas ellas definidas para la entrada escalón unitario.
Cabe señalar que todas estas especificaciones en el dominio del tiempo se emplean normalmente como la medida final del desempeño del sistema.
Configuración del Controlador
La mayoría de los métodos de diseño de sistemas de control convencionales se basan en el diseño de una configuración fija, por lo que el diseñador debe decidir el lugar donde el controlador estará colocado en relación con el proceso controlado.
Debido a que la mayoría de los esfuerzos de control involucran la modificación o compensación de las características de desempeño del sistema, el diseño general que involucra una configuración fija también es llamado compensación.
Las configuraciones comúnmente empleadas para compensación con controlador son:
1. COMPENSACIÓN EN SERIE
Configuración más utilizada en la cual se coloca el controlador en serie con el proceso controlado, por lo que se conoce como configuración de compensación en serie o en cascada.

2. COMPENSACIÓN MEDIANTE REALIMENTACIÓN
Configuración en la cual se coloca el controlador en la trayectoria menor de realimentación.


3. COMPENSACIÓN MEDIANTE REALIMENTACIÓN DE ESTADO
Configuración en la cual se genera la señal de control mediante la realimentación de las variables de estado a través de ganancias constantes reales.

Configuración del Controlador
Las configuraciones para compensación con controlador mostradas tienen un grado de libertad, ello por que sólo hay un controlador en cada sistema, aún cuando el controlador pueda tener más de un parámetro que pueda variar.
La desventaja de un controlador de un grado de libertad es que los criterios de desempeño que pueden realizarse están limitados. Por ejemplo, si seleccionamos las raíces de la ecuación característica para tener determinado amortiguamiento relativo, el sobrepaso máximo de la respuesta al escalón puede ser excesivo, debido a los ceros de la función de transferencia en lazo cerrado.
Configuración del Controlador
Configuraciones para compensación con controlador con dos grados de libertad:
4. COMPENSACIÓN EN SERIE-REALIMENTADA
Configuración en la cual se emplea un controlador en serie y un controlador en realimentación.


5. COMPENSACIÓN PREALIMENTADA
a) El controlador pre-alimentado Gcf(s) es colocado en serie con el sistema en lazo cerrado, que tiene un controlador en serie Gc(s) en la trayectoria directa.


b) El controlador pre-alimentado Gcf(s) es colocado en paralelo con la trayectoria directa por tanto no está en el lazo del sistema y no afecta las raíces de la ecuación característica del sistema original.


Después de escoger una configuración para el controlador, el diseñador debe escoger un tipo de controlador que con la selección adecuada de los valores de sus elementos satisfaga todas las especificaciones de diseño.
Los tipos de controladores disponibles para el diseño de sistemas de control están limitados sólo por la imaginación.
Una vez elegido el controlador, la siguiente tarea es determinar los valores de los parámetros del controlador. Frecuentemente los parámetros interactúan unos con otros y afectan las especificaciones de diseño en formas conflictivas. Es claro que entre más especificaciones de diseño y más parámetros haya, el proceso de diseño se vuelve más complicado, aunado a que se basa en gran medida en la experiencia del diseñador, y algunas veces en la intuición, por lo que involucra inevitablemente tanto arte como ciencia.
En general, podemos resumir las características en el dominio del tiempo que podemos emplear como guía para propósitos de diseño:
- Los polos complejos conjugados de la función de transferencia en lazo cerrado producen una respuesta al escalón unitario sub-amortiguada.
- Si todos los polos son reales, la respuesta al escalón unitario es sobre-amortiguada.
- Los ceros de la función de transferencia en lazo cerrado pueden causar un sobrepaso aún si el sistema es sobre-amortiguado.
- La respuesta de un sistema está dominada por aquellos polos más cercanos al origen del plano s (polos dominantes).
- Los transitorios debidos a aquellos polos a la izquierda decaen más rápido.
- Mientras más alejados a la izquierda del plano s estén los polos dominantes del sistema, éste responderá más rápido.
- Mientras más alejados a la izquierda del plano s estén los polos dominantes del sistema, éste será más caro y más grandes serán sus señales internas.
- Cuando un polo y un cero de una función de transferencia de un sistema se cancelan uno con el otro, la porción de la respuesta del sistema asociada con el polo tendrá una magnitud más pequeña.
- Las especificaciones en los dominio del tiempo y de la frecuencia están asociadas vagamente.
El Controlador PD
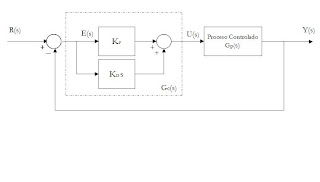

Función de transferencia del controlador
Señal de control aplicada al proceso


El controlador PD es en esencia un control anticipativo. Lo anterior debido a que de(t)/dt representa la pendiente de e(t), y al conocer la pendiente, el controlador puede anticipar la dirección del error y emplearla para controlar mejor el proceso.
Ventajas del control derivativo o PD:
• Tendrá efecto en el error de estado estable sólo si el error varía con respecto al tiempo.
• Añade un cero simple en s = - KP / KD a la función de transferencia de la trayectoria directa.
• No altera el tipo del sistema, que gobierna el error en estado estable de un sistema con realimentación unitaria.
• Mejora el sobrepaso máximo y mejora el amortiguamiento.
• Reduce los tiempos de levantamiento y de asentamiento.
El controlador PD es en esencia un control anticipativo. Lo anterior debido a que de(t)/dt representa la pendiente de e(t), y al conocer la pendiente, el controlador puede anticipar la dirección del error y emplearla para controlar mejor el proceso.
Desventajas del control derivativo o PD:
• No es efectivo para sistemas ligeramente amortiguados o inicialmente inestables.
• Puede requerir un capacitor muy grande en la implementación del circuito.
Implementación

Para implementar los diferentes tipos de controladores (P, PD, PI, PID) en MatLab se hace uso de la función de transferencia propia del sistema a objeto de estudio. Donde G(S) es la función de transferencia de un proceso; mientras que C(S) es la función de transferencia del controlador. 
CONTROLADOR PID
El controlador PID (Proporcional Integral Derivativo), es el controlador que en mayor medida se emplea, ya que combina las mejores características de los controladores PI y PD.
Lo anterior debido a que un controlador PD puede añadir amortiguamiento a un sistema, pero no afecta la respuesta en el estado estable.
Considere que el controlador PID no es sino un controlador PD conectado en cascada con otro controlador del tipo PI.
Para implementar los diferentes tipos de controladores (P, PD, PI, PID) en MatLab se hace uso de la función de transferencia propia del sistema a objeto de estudio. Si dicho sistema es de la forma:

donde G(S) es la función de transferencia de la planta o proceso; mientras que C(S) es la función de transferencia del controlador.
Para el caso del controlador proporcional, C(S)=Kp, que es una constante o valor escalar. El controlador PI es C(S)=Kp + Ki/S que puede representarse como una relación ente dos polinomios. El controlador PID es C(S)=Kp + Ki/S + Kd S que se representa como:

que es de nuevo una relación entre dos polinomios. Los coeficientes decrecientes en potencias de S de estos polinomio pueden ser almacenados en vectores en MatLab. Si se multiplica el controlador C(S) por la función de transferencia del proceso o planta G(S) se formará la función de transferencia de lazo abierto. Por ejemplo un G(S) puede ser:

Para obtener la respuesta en lazo abierto ante una entrada escalón unitario tenemos:

En esta grafica podemos observar los diferentes controladores en donde podemos comprobar que el controlador PID es el mas completo.

Mediante la implementación del software llamado Matlab se llevara a cabo la comprobación de un sistema con base a su función ya establecida.

Graficando el sistema original con K=1 podemos comprobar que el sistema no cumple con las especificaciones deseadas como tal es el caso del tiempo de levantamiento (tr).Por lo que es necesario agregar el controlar.
Por lo que se da ala tarea de desarrollar dicha funcion como se ve a continuacion:


Podemos observar que el sobre paso máximo es menor del 5%. El tiempo de levantamiento es menor de 0.01s y el tiempo de asentamiento es menor de 0.02s según lo establecido.



Podemos observar que el error en estado estable en la parábola es menor de 0.2.








En este ejemplo podemos observar la implementación de un sistema de control PID de lazo cerrado en que se basa de un sistema original al que se le añade un sistema de control PI y después el sistema de control PID en el que podemos comprobar el mejor funcionamiento del controlador PID graficando la función normal y la función rampa.








Como sabemos el objetivo de cualquier sistema de control es llegar en el menor tiemplo posible a su estado estable y como se pudo observar graficando no es hasta con el controlador PID cuando se logra observándolo con el sistema normal y la función rampa.
Bibliografia: Benjamin C Kuo, "Sistemas De Control Automatico", Prentice Hall, Septima Edicion.
tu calificacion es 100 muy buen trabajo
ResponderEliminar